beschreibt die mechanischen Eigenschaften von verformbaren Körpern und die Generierung/Widerstand von Kräften, Bewegungen von großen Organismen.
Kräfte die Deformation verursachen
- Kompression
- Dehnung
- Biegung (bending)
- Scherung (schering)
- Torsion
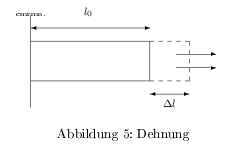
\( \Delta l = l - l_0 \) Die Dehnung ist wie folgt charakterisiert: \( \epsilon = \frac{\Delta l}{l}\) Die Spannung gibt die Fähigkeit an, einer Kraft \( F \) im Verhältnis zur Fläche \( A \) zu widerstehen:\newline \( \sigma = \frac{F}{A} \ [Nm^{-2}] \) Wird ein Körper durch Dehnung deformiert, dann ergibt sich folgender Zusammenhang:
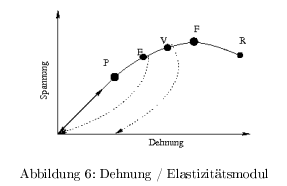
Die Steigung \( \frac{\sigma}{\epsilon} \) wird als Elastizitätsmodul oder Youngschen Modul \( (Y) \) bezeichnet Im Bereich geringer Dehnung bis zur Proportionalitätsgrenze \( P \) gilt das Hooksche Gesetz: \[ Y=\frac{\sigma}{\epsilon} \] wonach die Spannung zur Dehnung proportional ist. Bei stärkerer Dehnung gilt dieser lineare Zusammenhang nicht mehr. Die Dehnung ist jedoch bis zur Elastizitätsgrenze \( (E) \) reversibel. Eine Dehnung über den Punkt \( (E) \) hinaus führt zu irreversibler Verformung. So bleibt eine Restdehnung \( (\epsilon ') \) erhalten. Bei einer Dehnung über die Fließgrenze \( (F) \) hinaus, zerfließt der Körper ohne weitere Spannungserhöhung spontan, bis er am Punkt \( (R) \) zerreißt.
Scherspannung (=schearstress)
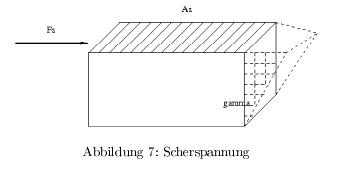
Das Schermodul ist: \[ G = \frac{\tau}{\gamma} \tau =\frac{F_S}{A_S} \] ( \( \gamma = \) Scherwinkel)
Torsion
Torsionsspannung
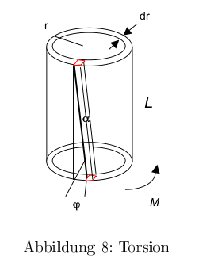
\[ \begin{align} \sigma &= \frac{dF}{dA}= Y * \alpha = Y \frac{r*\phi}{L} \\ dA &= 2\pi\,r\,dr \\ dF &= dA * Y*\frac{r*\phi}{L} \\ &= 2\pi\,r^2\,dr\,Y\,\frac{\phi}{L} \\ & \text{Das Drehmoment} \\ dM &= dF*r = 2\pi\,r^3\,dr\,Y\,\frac{\phi}{L} \\ & \text{durch Integration} \\ M &= \underbrace{\frac{\pi * Y}{2\,L}r^4}_{D_{tors}=Torsionssteifigkeit} *\,\phi = D_{tors}*\phi \end{align} \]
Torsionssteifigkeit
Die Torsionssteifigkeit für zylinderförmige Körper ist wie folgt beschrieben: \[ D = \frac{\pi *Y}{2\,l}r^4 \]
Elastische Spannungsenergie
Um einen Stab zu dehnen, muss Energie aufgebracht werden. Beim Dehnungsvorgang werden die Atomabstände vergrößert, beim Erreichen der Ausgangslage wird diese Energie mit einem Verlust durch Wärme wieder frei. Diese Energie wird als elastic strain energy bezeichnet. \[ U_{\epsilon}=\frac{1}{2} \sigma * \epsilon \]
Anisotrope Materialien
Bei anisotropen Materialien variiert die Elastizität in verschiedene Richtungen, wie z.Bsp. bei Knochen. Wenn Druck auf einen Knochen in \( z \) -Richtung ausgeübt wird, dann entstehen unterschiedliche Spannungen in \( x \) und \( y \) -Richtung.
Biegungsspannung
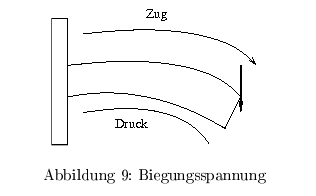
Bsp. Holz: Ausweg aus den verschiedenen Spannungsbelastungen sind Kompositmaterialien wie Druck- und Zugholz. Die Zellulose Mikrofibrillen sind mit unterschiedlichem Winkel angeordnet, wo durch die Spannungsunterschiede ausgeglichen werden.